Overview
Compiled RobotRoss knowledge page generated from RobotRoss source code, architecture notes, and operational documentation.
Contents
Local Reasoning Session
The ATF query layer works on the local system. Operators can search the compiled wiki and the operational ledger without shipping the evidence corpus to a cloud runtime.
RobotRoss System Overview
1. Introduction
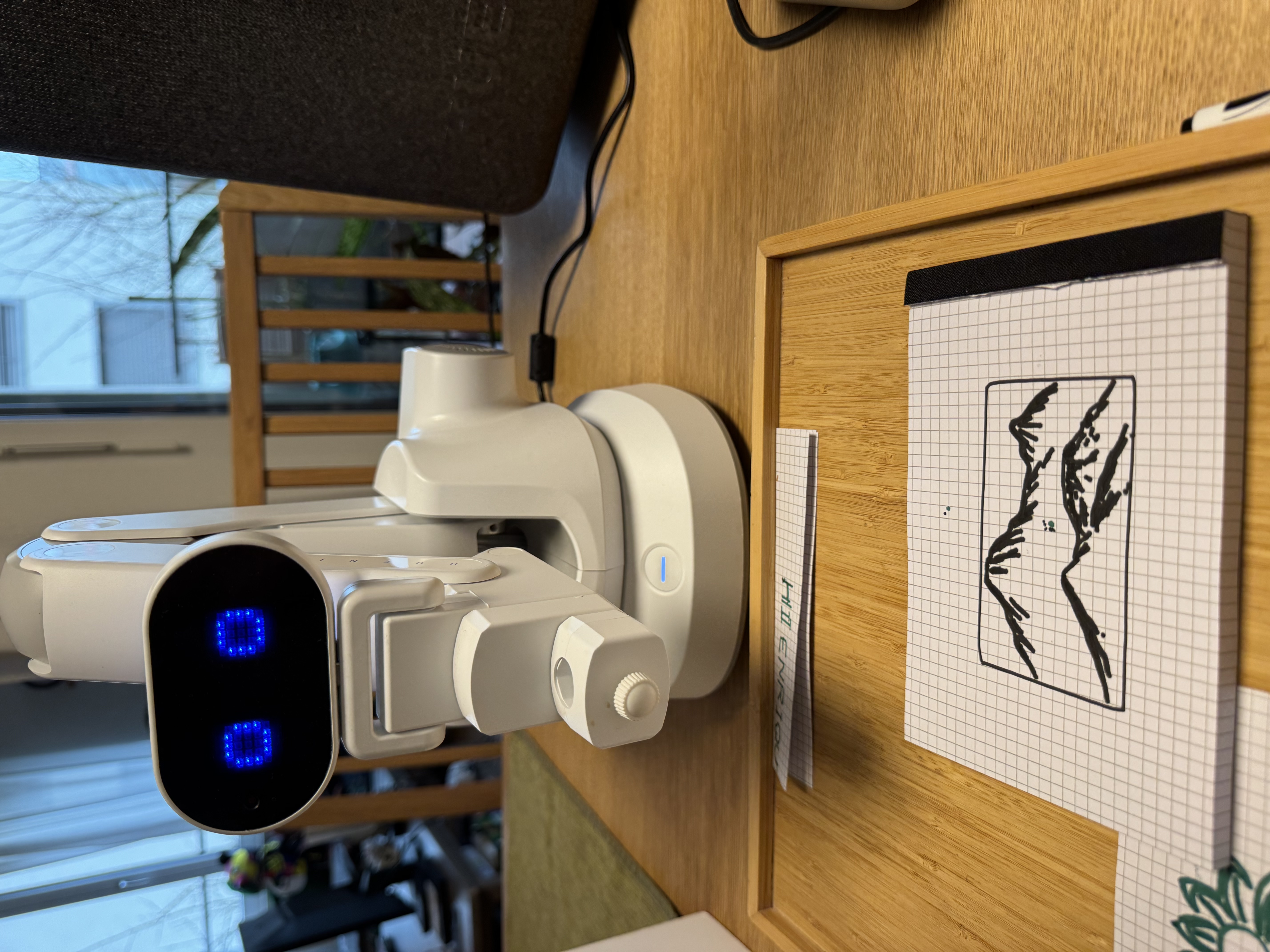
RobotRoss is an autonomous robotic artist platform designed to bridge AI creativity with physical execution. It uses a Huenit robotic arm to draw plotter-optimized SVGs or write calligraphy while providing poetic narration in the style of Bob Ross.
2. Core Architecture
The system follows a three-layer architecture:
- Commerce Layer: Commerce Layer handles order intake, queue management, and the competitive bidding system.
- Orchestration Layer: Job Orchestration (primarily
bob_ross.py) manages the job lifecycle, narration, recording, and uploading. - Hardware Layer: Hardware Interface provides low-level G-code control and calibration for the robot arm.
3. Key Subsystems
- Commerce Layer: Salesman API and order queue management.
- Job Orchestration: The brain of the artist side.
- Hardware Interface: Serial G-code control of the Huenit arm.
- Order Management: Polling and logging of drawing jobs on the Artist side.
- Narration: Local LLM-based poetic commentary.
- Video Proof: Automated OBS recording and YouTube uploading.
4. Key Integration Topics
- Bidding Rules: Competitive overwrite rules and the 8x8 Wall of Fame.
- Shopify Integration: Webhooks, metadata write-back, and human e-commerce.
- Virtuals ACP: Agentic commerce protocol for autonomous hiring.
- Calibration: Necessary startup procedures for hardware accuracy.
- Compliance: EU AI Act mapping and architectural traceability.
- Voice Control: Whisper STT, local reasoning, and Voxtral TTS.
- Architecture: ATF structure and Flotilla execution context.
5. Hardware Requirements
- Computer: Mac Mini M4 (Apple Silicon)
- Robot: Huenit Robotic Arm
- Cameras: Reolink 4K (Main) + macOS Screen Capture (Board)
- Audio: BlackHole 2ch for internal routing
6. Software Stack
- OS: macOS (darwin) for Artist; Ubuntu (Linux) for Salesman.
- LLM: Apertus 8B (local via Ollama)
- Agent Framework: OpenClaw
- Utilities: OBS Studio, ffmpeg, Python 3.12, Node.js
7. Notes and Open Points
- Calibration Persistence: Source code indicates calibration is required after every restart (
READY_FLAGin/tmp), but some docs suggest it might be semi-persistent. - Pen Pressure: Manual leveling of the table is mentioned as a physical requirement that software cannot currently compensate for.
- Narration Latency: There is an inherent delay while Apertus 8B generates narration, which
bob_ross.pyhandles with a wait period, but the impact on "live" feel is a point of ongoing optimization.
Sources:
AGENTS/CONTEXT/robot_ross_artist.mdAGENTS/CONTEXT/robot_ross_salesman.md~/.openclaw/workspace/skills/robot-ross/bob_ross.py